
Le L’atterrisseur SLIM de la JAXA a effectué une atterrissage en douceur sur le sol de la Lune ces derniers jours. Comme nous le savons, tout ne s’est pas déroulé comme prévu et, en raison d’une défaillance du système de propulsion, l’engin a été envoyé sur la Lune.atterrissage sur la lune s’est produit avec le Atterrisseur japonais qui s’est incliné vers l’avant, ne permettant pas aux panneaux solaires de générer de l’électricité pour le maintenir actif comme prévu. Tout n’est pas encore perdu car le 1er février, le Soleil dans la zone d’atterrissage pourrait se coucher et ainsi éclairer l’atterrisseur pour lui permettre de se réveiller (en chargeant les batteries).
Images de la caméra de navigation JAXA SLIM
Malgré ce revers, le Japon reste la cinquième nation à avoir atterri sur la Terre. Lune après les États-Unis, l’Union soviétique/Russie, la Chine et l’Inde. Plusieurs objectifs ont également été atteints : la atterrisseur japonais a réussi à capturer des images de la zone d’atterrissage, le système d’évitement d’obstacles a fonctionné correctement, l’atterrisseur japonais est resté en place. Le rover LEV-1 e LEV-2 ont été libérés correctement et LEV-2 a capturé une image de l’atterrisseur (l’envoyant à LEV-1 et cette dernière à la Terre). Le plus important reste la la précision de l’atterrissagea été affectée par le problème du propulseur, qui a provoqué un atterrissage à 55 mètres distance de la cible, mais dans les 100 mètres prévus. Autre bonne nouvelle, le Sonde Lunar Reconnaissance Orbiter de la NASA (LRO) a capturé une image de la Un atterrisseur intelligent pour explorer la Lune.
Le LRO de la NASA a capturé une image de SLIM de la JAXA.
Selon l’agence spatiale américaine, NASA LRO a réussi à capturer une image de JAXA SLIM pendant qu’il est à la surface après le atterrissage en douceur. En particulier, l’orbiteur a photographié les Atterrisseur japonais le 24 janvier, environ cinq jours après l’alunissage, à une altitude d’environ 80 km.
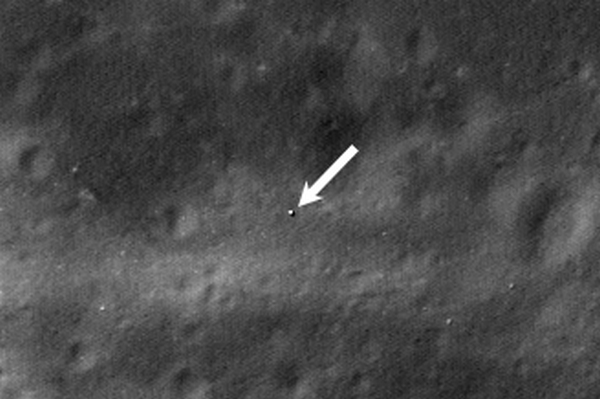
Un atterrisseur intelligent pour explorer la Lune n’est pas particulièrement importante et donc, bien qu’elle soit perceptible par rapport à la surface de la Lune, seules certaines caractéristiques et modifications du sol causées par les propulseurs peuvent être définies. En utilisant une image qui met en valeur les changements et la luminosité des caractéristiques de la surface avant et après un événement, on peut voir comment JAXA SLIM est en fait l’endroit où il était censé se stabiliser à 1,4 m/s pendant la dernière partie de l’atterrissage.
Autre bonne nouvelle, l’agence japonaise a publié le rapport de l’Agence européenne pour la sécurité et la santé au travail. diapositives en anglais de la conférence avec des données et des informations sur ce qui a fonctionné et ce qui n’a pas fonctionné pour l’UE.L’alunissage SLIM de la JAXA. Rappelons que l’atterrisseur avait automatiquement identifié sa position par rapport au sol lunaire et qu’il se trouvait à l’altitude et à la vitesse correctes.
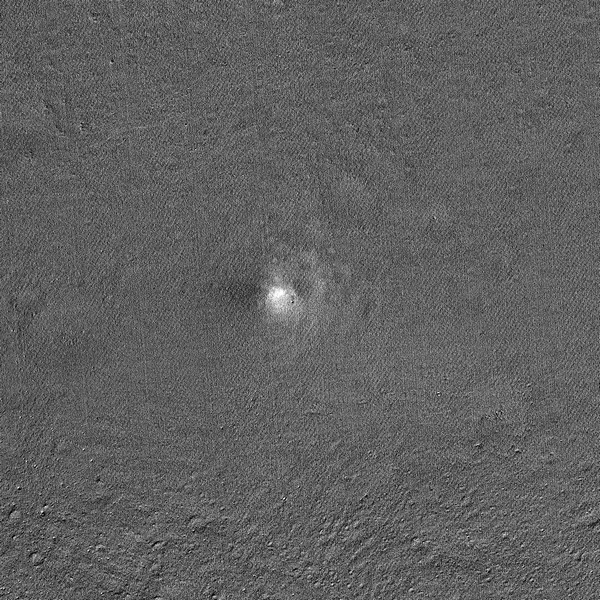
Image mettant en évidence les différences entre avant et après l’alunissage de SLIM
A 50 mètres de la surface, l’analyse du terrain avait permis de choisir une zone d’atterrissage correcte, en évitant les obstacles présents. C’est également à cette altitude que s’est produit le problème lié à l’analyse du terrain. système de propulsion par JAXA SLIMqui a instantanément perdu 55 % de sa puissance. L’analyse des données a révélé que l’un des deux moteurs principaux ne produisait pas de chaleur et a donc été considéré comme hors service.
Grâce aux deux caméras de navigation, il a été possible de filmer ce qui semble être une tuyère se détachant de l’atterrisseur et se dirigeant vers le sol lunaire (avec d’autres fragments). JAXA a confirmé qu’aucun problème n’avait été signalé lors des précédents démarrages après le lancement. La cause ne serait pas directement liée au moteur mais à des causes externes, qui n’ont pas encore été clarifiées.

L’un des principaux moteurs de la JAXA SLIM peut générer une poussée équivalente à la gravité lunaire, ce qui rend difficile un atterrissage lunaire entièrement contrôlé en termes de position et de vitesse. À 50 mètres, l’atterrisseur avançait à 2 m/s ou 3 m/s vers le sol. L’absence de moteur a également eu un impact sur le déplacement horizontal tout en permettant aux deux rovers LEV-1 et LEV-2 d’être libérés à une altitude de 5 mètres. Bien qu’il n’ait pas atteint tous ses objectifs, le projet atterrisseur L’atterrisseur japonais a passé avec succès certains des tests les plus difficiles et pourrait encore se réveiller dans les prochains jours.



